






Productos relacionados
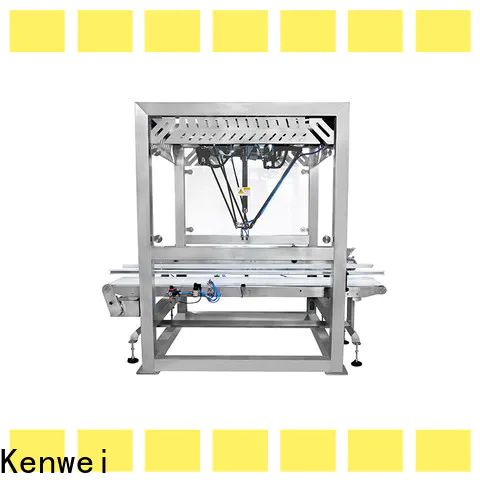


El manipulador paralelo adopta una estructura de articulación de 4 ejes y un sistema de servocontrol para garantizar la precisión de la aplicación de trabajo. El manipulador paralelo se puede equipar con transporte visual o incorporado y una aplicación integrada, que admite la aplicación personalizada de la sección de transporte y tiene una configuración flexible. Es adecuado para todo tipo de materiales de transporte en alimentos, medicinas, condimentos, plásticos, artesanía, electrónica y otras industrias.



Modelo | JW-D1100 | |
Código de identificación | D1100-1-1 | |
Tipo de estructura | DELTA (paralelo de cuatro ejes) | |
Precisión de repetición | ±0,1mm | |
rango de trabajo | ø1100mm | |
velocidad máxima | 150P/M | |
carga maxima | 3000g | |
Requisitos de energía | 220V/4000W/ 50/60Hz /20A | |
Dimensiones del embalaje (mm) | 1200 (largo) x 1100 (ancho) x 610 (alto) | |
peso bruto | 110 kilos | |

Aplicable a alimentos, medicinas, especias, plásticos, artesanías, electrónica y varios tipos de clasificación y transporte de materiales de otras industrias.
Es adecuado para pesar semillas, maní, nueces, almendras, pasas, dulces, pistachos, papas fritas, albóndigas y otros gránulos, láminas, tiras, material de forma redonda.
Es adecuado para pesar semillas, maní, nueces, almendras, pasas, dulces, pistachos, papas fritas,
albóndigas y otros gránulos, láminas, tiras, material de forma redonda.
Copyright © 2018 Guangdong kenwei Intelligent Machinery Co., Ltd. Todos los derechos reservados | Reservados todos los derechos

